Intro
This page(s) try to document my adventures producing a working monocopter.
What is a monocopter, you ask? Imagine a single helicopter blade, with a stick sticking out where it would attach to the hub, and on that stick is a motor with a propeller that makes the thing rotate. No fuselage, nothing. See this YouTube video, for example.
Crazy stuff, which is exactely why I'm interested.
My version will be radio controlled and running an electrical power plant, and ultimately I want it to be steerable.
Phase 1: Build it, get it to lift off, be stable both under power and without (autorotation).
Phase 2: Add a control surface to get collective control (in heli terms)
Phase 3: Add electronics (magnetometer?) so it knows where it is in the rotation, and use that to implement cyclic control
Phase 4: Add sensors (barometric, distance, GPS, ...) and try to let it fly autonomously.
Status
Currently in the middle of phase 1; on 2013-01-26 I had a first version that would lift (tethered), but it broke, so I'm currently rebuilding.
Blog / Lab notebook
A few calculations
It's still way too windy outside, so lets do some calculations.
We have the rotation rate at which the copter lifts, and the construction details. This means we should be able to get the (average) coefficient of lift $C_l$ from the lift force $L$ and the wing area $S$.
$C_l = 2L/(rho v^2 S)$
$v = omega r$
$C_l = 2L/(rho omega^2 r^2 S)$
Due to the square relation to the radius, just taking half the span of the wing (0.3m) isn't really valid, and it gives a $C_l$ of about 1, which seems pretty high for the sorry excuse of a wing profile that I use.
So, if I grok this (and I'm absolutely not sure I do), we need $root3(1/2) = 0.7937$ of the span, that gives $r = 0.476$ and $C_l = 0.4$, which is way more believable.
(The idea behind this is that $int x^2 = 1/3 x^3$, so with $x=1$ we have $1/3 x_(avg)^3 = 1/6$.)
On to the drag, which has the same formula:
$C_d = 2F/(rho omega^2 r^2 S)$
Which gives $C_d = 0.29$. Seems high, even including the drag from the rest of the copter besides the wing. Is that an effect of induced drag? A quick calculation gives a result on the order of $0.1N$, so probably not, even if it really is for wings with elliptical lift distribution etc.pp.
Constants:
- $L = 1.619 N$ (165g)
- $F = 1.17 N$ (120g)
- $rho = 1.293 (kg)/m^3$ (at 0°C)
- $omega = 21.36 s^-1$ (3.4 Hz)
- $S = 0.06 m^2$
Finding rotation rate from sound files
So how fast does the copter rotate? One can hear the characteristic volume variations in the videos, so:
- extract sound from video
- extract volume/envelope
- autocorrelate that
- plot
A bit of fiddling with Octave, and here it is:
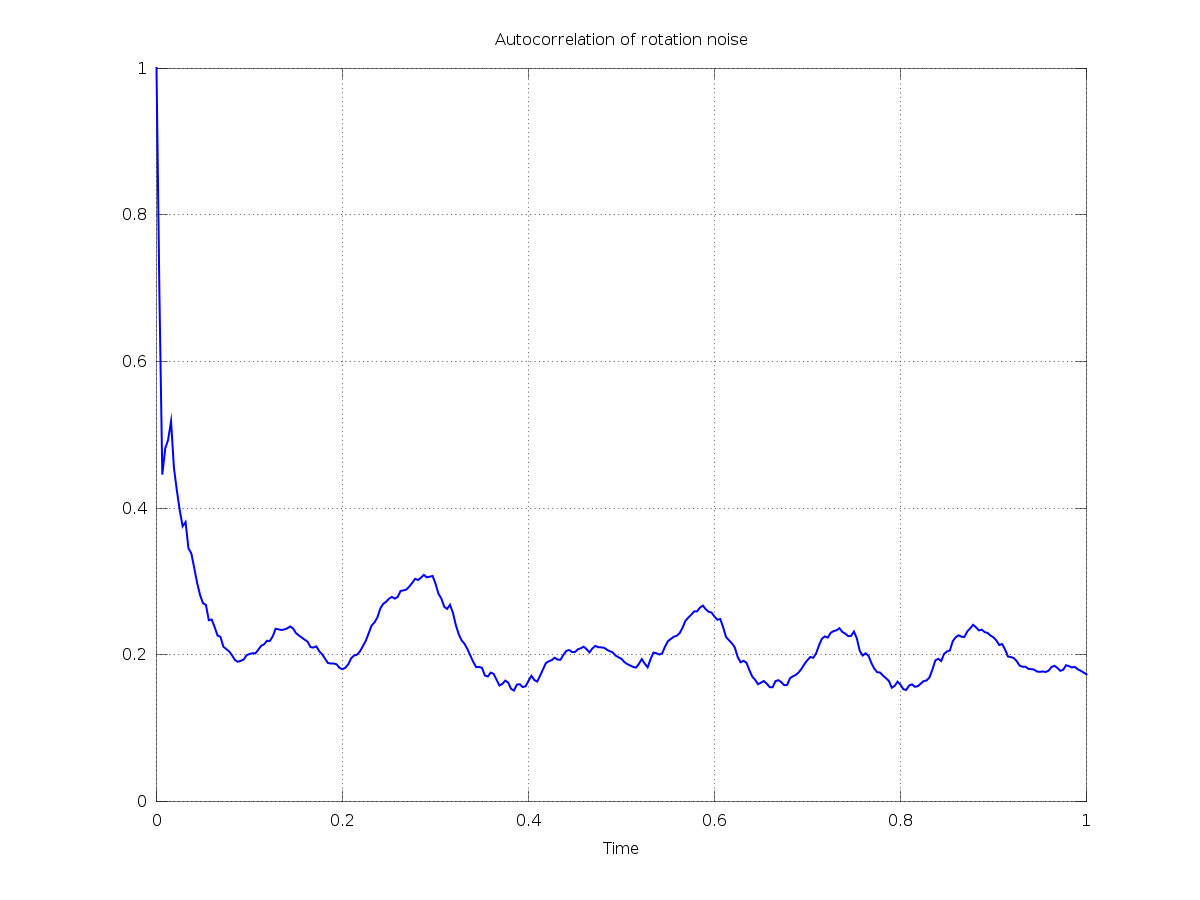
It turns out the fastest rotation has a period of about 0.24s, but there the AoI is too low so it doesn't lift.
When it does lift, it rotates with a period of about 0.29s, that is 3.4Hz or 207 RPM.
The code is here.
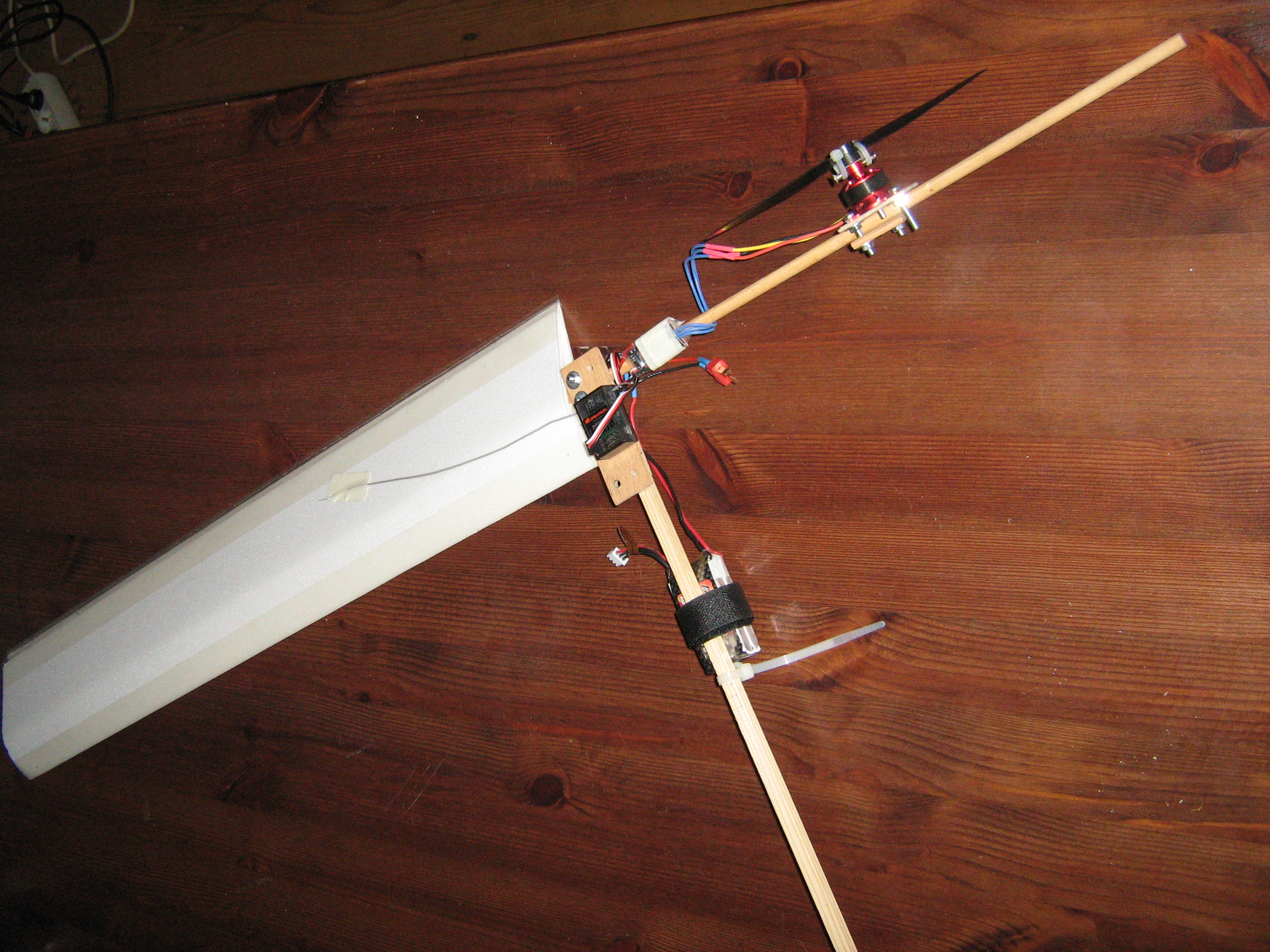
Despite gusty wind, I managed to get it to fly again, although the best AoI has still to be determined:
This is a working AoI:
Built a new wing with the same dimensions, and modified the motor mount; that brings the weight down to 164g and makes it v1.2.
Changed propeller to 5x3 (from a 4x3).
However, there's about 40 km/h of wind this weekend, and that interferes heavily with my tests. I couldn't get it to lift, but it was rotating stably even with the wind at about 4 Hz.
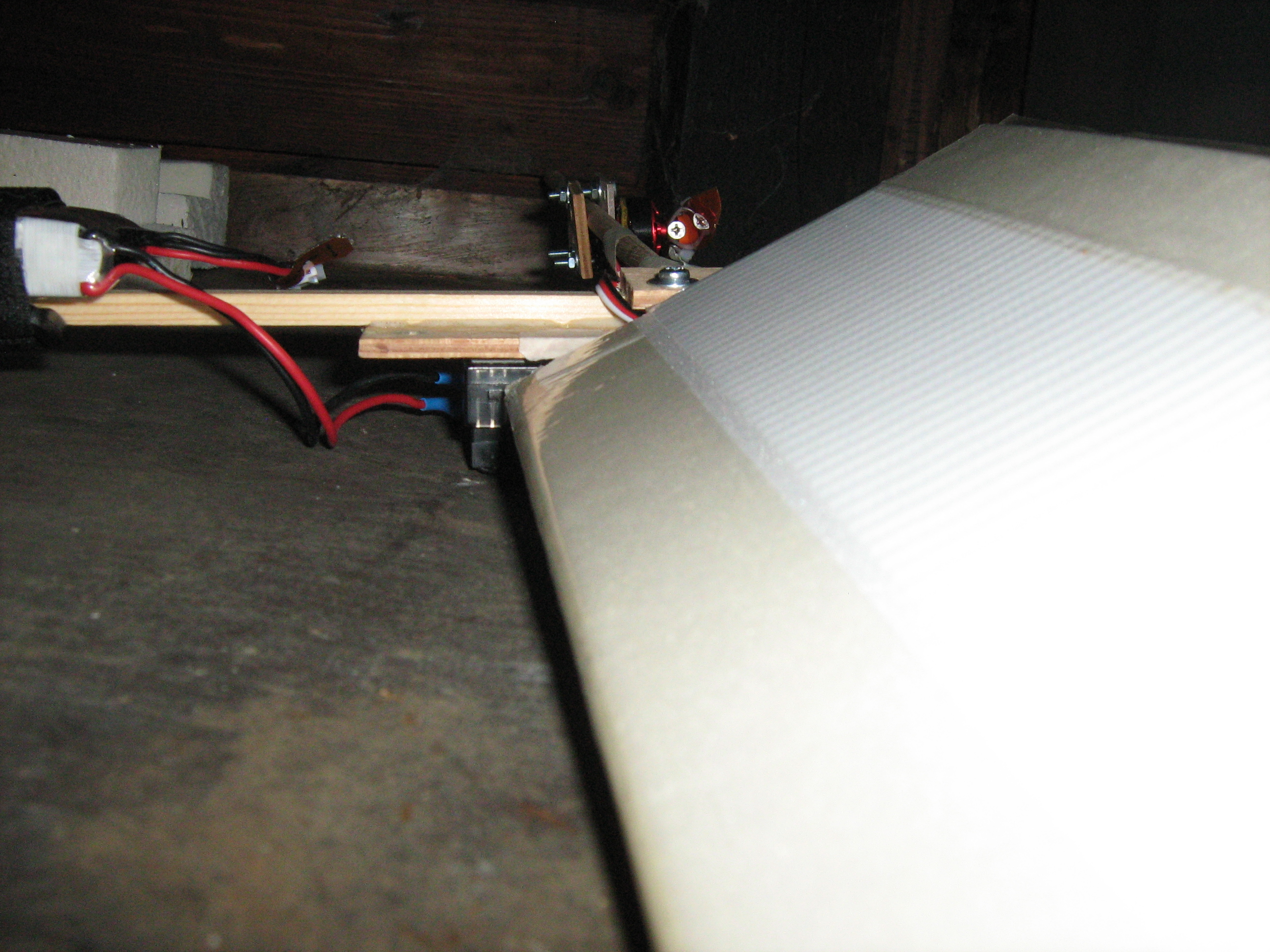
Today, I managed to shoot a picture before trying to destroy the copter:
Prop thrust
Then I built a not-too-exact rig to measure thrust; the 6x3 prop gives about 150g, and then it touched something and broke.
The 5x4.5 and 5x3 both give about 120g. The timing setting on the ESC doesn't seem to make a difference.
No current or power measurements, the replacement wattmeter still hasn't arrived.
Gyroscopic precession
McCutchen says that stability is partially achieved by gyroscopic precession of the prop; his models turn clockwise (when viewed from the top), so precession provides more AoI in the blade; mine turns CCW...
On 2013-01-26, late in the evening, I got my first monocopter to do more than just rotate: it actually lifted. It was a tethered flight, in the sense that the copter was secured to a vertical rope to keep it from going astray.
It could only climb about a meter or so before it reached the upper end of the rope, but the rotation was pretty stable at about 3.3 Hz, and by working the throttle, it could be made to climb and descend repeatedly. Let's call it v1.0.
Since it was night, there's no video, and I also forgot to take pictures.
The next day, I rebuilt the center section to improve weight and to get the COG in front of the wing (as the Charybdis should have), but rotation was unstable, which finally led to the wing folding right at the end of the dowel, I suspect because the whole thing flapped wildly. That was v1.1.
Now I have a new wing waiting for the glue to dry, and I'll continue with that next weekend.
Things to improve/next steps:
Try (slowly!) which position of COG/center of rotation is stable.
Get it to climb again.
Document that status!
Play with the AoA to find an optimum. See whether lift can be quantified, record RPM, see if there's stability impact
Measure power and thrust with various props (waiting for Giantshark to return the wattmeter - as delivered, it showed 0.6A of current with no load connected) and select the best one.
Brave enough for untethered flight?
A bit of description of the various iterations:
v1.0
The copter is inspired by the age-old Charybdis model, that is, it had a 60x10cm² depron wing, a 35cm 7mm round dowel glued 5cm into the wing (the rest of the wing had a depron spar), and the wing consisted of two 30cm sections - I had started with a 30x10 wing that didn't produce enough lift, and taped a second section onto the end.
The center section (plywood) had machine screws and a second piece of plywood clamping the dowels (wing and balance shaft), so the angle of attack could be adjusted easily. The motor was mounted with a similiar construction. The LiPo was velcroed to that center plate, and there was a hole to put the starting stick or rope through, at the COG.
The power plant is a M2222/31 from Giantshark, 50W, 2280kv, a rather small brushless outrunner - but the original Charybdis ran a motor rated at 10 or 15 watts. It is driven by a Hobbywing 10A ESC, a 800mAh 2S LiPo, and a Spectrum receiver.
COG was next to the wing, at about 10-20% chord. AoA was about 30%, mass ca. 175g.
v1.1
The only change was the center section; I went from 2mm to 3mm plywood, because the 2mm flexed to much when clamping the rods. The balance rod is now glued on (6x8mm Pine), the hole at the COG is about 1cm in front of (and next to) the wing, and the battery is further out to adjust the COG.